

Moj okvir je točno tak, kot ga je predstavil. Iz HK so prihajali dvoji okvirji. Iz centralnega so bili ves čas taki, kot ga imaš ti, iz Nizozemske pa verzija z povezave. Ampak so očitno tudi te spremenili in začeli pošiljat enake, kot iz centralnega skladišča. <moj okvir je do sedaj imel kar nekaj padcev, najprej zaradi težav z regulatorji, potem pa akrobacije. S tem da mi je enkrat padel iz petih metrov direktno na eno roko in je odbilo le motor (najlonski vijaki) in polomilo propelerje, šele zadnji padec je bil usoden za dve roki okvirja, ko je model iz lupinga priletel pod kotom 20° v zemljo s skoraj polnim plinom (kot tisti meteorit v rusiji). Zgledalo je, kot da bom potreboval sesalec za pospravljanje razbitin, pa sem polomil propelerje, dve roki sta napokali, ena pri motorju, druga pri vijakih ob pri centralni plošči.scorpioncek napisal/-a:Ena primerjava med DJI rokami in HK
http://aeroquad.com/showthread.php?5872 ... el-clones)
dopade se mi zasnova povezave na koncu roke, kjer pride motor. Mislim, da niso zastonj naredili tam ojačitev do sredine. Ravno tam najbolj pokajo roke, kjer ima HK ojačitev preveč v roko premaknjeno. Tam je šibek del pri HK- tisto verjetno kar nekaj sile prenese na konstrukcijo pri DJI
Še en začetnik - prvi quadcopter
Re: Še en začetnik - prvi quadcopter
-
matej rozman

- Freak
- Prispevkov: 852
- Pridružen: 26 Jul 2005, 15:06
- Kraj: Velenje
Re: Še en začetnik - prvi quadcopter
Boljša verzija ima gor nalotan baro senzor (alt hold) in magnetometer oz.kompas (nuja za GPS oz. position hold,.....), medtem kot je cenejša enaka brez teh dveh dodatkov.scorpioncek napisal/-a:Spet so tukaj dvomi, ali malo več dati pa vzeti naszo lite ali pa si omisliti NAZE32 z gps,baro itd.
Vidim da pride osnovna verzija 15€, boljša pa 43€ (seveda + stroški).
Ali je boljša verzija enako zmogljiva kakor naza?
Poglej si tele videe od ustvarjalca Naze 32, obvezno preberi komentarjescorpioncek napisal/-a: Moti me tole opozorilo:
Note: This hardware cannot be used with any DJI frames. This includes: FlameWheel 330, 450, 550, or any future or past frames released by DJI.
[/url]
http://www.youtube.com/watch?v=a55A4lUIAdE
http://www.youtube.com/watch?v=mq90dWrFEiQ
plp, Matej
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Da malo posodobim temo...
Ker sem imel toliko težav - predvidoma z KK ploščico, sem si za test umislil NAZE32. Ohišje je prispeval Matej, slikic pa zaenkrat še ni... Moram pa rečt, da je ohišje kot ulito...
Včeraj sem zlotal pine, zmonitral vse skupaj na quada in danes šel to čudo preizkusit.
Nisem kaj veliko nastavljat, zato je bil tudi rezultat skoraj katastrofalen.
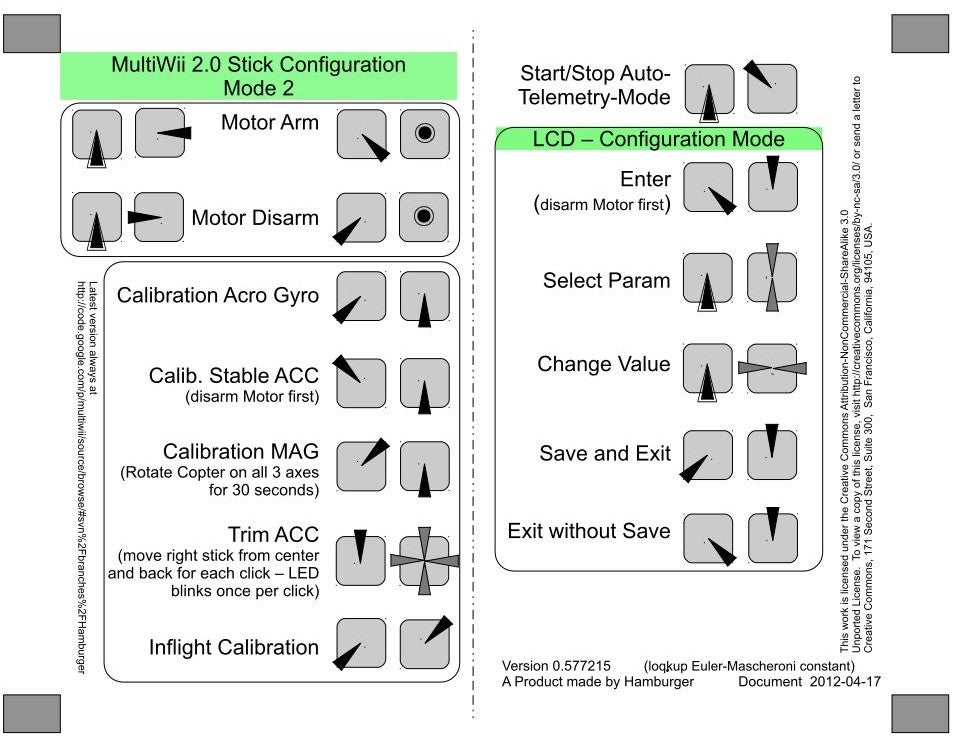
Edino kar sem nastavil je ANGLE (autolevel) in BARO funkciji na dvojnos tikalo, potem pa še HORIZON na drugo stikalo.
Razlika med temi modi je:
What's new in MultiWii R 1356 Dev:
March 2nd, 2013
Control mode:
introduction of HORIZON MODE. We have now 3 modes:
ACRO mode:
· This is the default one when none of the ANGLE & HORIZON BOX is activated.
· The copter will continue rotating in the direction in which you tilt sticks. When you let go of sticks it will maintain that angle and not return to level
ANGLE mode:
· The position of the stick indicates the angle at which the copter tries to maintain. Sticks off = level. Full sticks in any direction and it will tilt at around 50 degrees. It's proportional in-between.
· It maintains the angle set by the stick. Let go of sticks and it returns to level
· HORIZON mode
What's new in MultiWii R 1349 Dev:
February 22nd, 2013
· baro Alt from mahowik
· baro calibration and some baro mods from Sebbi
· new task scheduler for a better computation time repartition
· better Ublox code detection
· HORIZON mode (mix between ACRO & ANGLE)
· ANGLE mode is the old LEVEL mode
· every UART for everything on MEGA
· cool GUI enhancement from magnetron
· spektrum bind button for spektrum receiver (Danal)
· telemetry cosmetic
· bug correction for servos on MEGA
· failsafe is more robust
· variometer from Hamburger
· mag gain calibration improvement for HMC5883L from EOSBandi
· GPS MKT binary parser from EOSBandi
· GPS forward predictive filter from EOSBandi
· follow me option works now in GPS HOME&HOLD mode via a ezio app
· RSSI added
· reconnect button in gui (uart speed can be changed in the file .txt)
· IMU optimization
Najprej se je treba zavedat da brez nobenega pripomočka ob pomiku komande naprej, gre quad naprej, ko pa spustimo komando, ostane quad kakor smo ga pustili - v poziciji za naprej(ACRO mode). Moram priznat da kljub temu da je več dela se da letet nekoliko lažje kot z KK ploščico. Nekako je vse bolj umirjeno.
Potem sem poizkusil z ANGLE funkcijo in je bilo letenje še malo lažje ampak še daleč od lepega...
Z funkcijo baro nisem kaj veliko testiral, saj sem imel sam s sabo preveč dela...
Ko sem pa probal funkcijo HORIZON je bilo od začetka vse lepo, potem pa je quad sili v luft in močno v stran, tudi rotirati se je zače počasi in ker je zadeva pridobivala na hitrosti in šla daleč stran od mene, ne glede na to kam sem ga hotel spravit sem samo gledal kam ga bom parkiral. No in sem ga...na drevo... ene 200m stran od mene in ene 3m visoko je obvisel. Posledice --- NIOBENIH razen nekaj trnja po nogah, ko sem probal čez šavje pridet do drevesa.
razen nekaj trnja po nogah, ko sem probal čez šavje pridet do drevesa.
Tukaj sem imel veliko srečo in mislim da gre tudi zasluga nastavitvam, saj ko ARMamo kontroler, se pričnejo propi vrtet kar pripomore k počasnejšemu padanju.
Zaenkrat sem odmislil BARO in HORIZON funkcijo in bom poizkusil v ACRO modu počasi letet pa tudi z ANGLE se bom poigral.
Čeprav mislim, da bom rabil pomoč pri trimanju modela oziroma pri nastavitvi PIDov... da bom vsaj vedel da model leti tako kot mora in da napake so izključno moje...
Še nastavitve

Ker sem imel toliko težav - predvidoma z KK ploščico, sem si za test umislil NAZE32. Ohišje je prispeval Matej, slikic pa zaenkrat še ni... Moram pa rečt, da je ohišje kot ulito...
Včeraj sem zlotal pine, zmonitral vse skupaj na quada in danes šel to čudo preizkusit.
Nisem kaj veliko nastavljat, zato je bil tudi rezultat skoraj katastrofalen.
Edino kar sem nastavil je ANGLE (autolevel) in BARO funkciji na dvojnos tikalo, potem pa še HORIZON na drugo stikalo.
Razlika med temi modi je:
What's new in MultiWii R 1356 Dev:
March 2nd, 2013
Control mode:
introduction of HORIZON MODE. We have now 3 modes:
ACRO mode:
· This is the default one when none of the ANGLE & HORIZON BOX is activated.
· The copter will continue rotating in the direction in which you tilt sticks. When you let go of sticks it will maintain that angle and not return to level
ANGLE mode:
· The position of the stick indicates the angle at which the copter tries to maintain. Sticks off = level. Full sticks in any direction and it will tilt at around 50 degrees. It's proportional in-between.
· It maintains the angle set by the stick. Let go of sticks and it returns to level
· HORIZON mode
What's new in MultiWii R 1349 Dev:
February 22nd, 2013
· baro Alt from mahowik
· baro calibration and some baro mods from Sebbi
· new task scheduler for a better computation time repartition
· better Ublox code detection
· HORIZON mode (mix between ACRO & ANGLE)
· ANGLE mode is the old LEVEL mode
· every UART for everything on MEGA
· cool GUI enhancement from magnetron
· spektrum bind button for spektrum receiver (Danal)
· telemetry cosmetic
· bug correction for servos on MEGA
· failsafe is more robust
· variometer from Hamburger
· mag gain calibration improvement for HMC5883L from EOSBandi
· GPS MKT binary parser from EOSBandi
· GPS forward predictive filter from EOSBandi
· follow me option works now in GPS HOME&HOLD mode via a ezio app
· RSSI added
· reconnect button in gui (uart speed can be changed in the file .txt)
· IMU optimization
Najprej se je treba zavedat da brez nobenega pripomočka ob pomiku komande naprej, gre quad naprej, ko pa spustimo komando, ostane quad kakor smo ga pustili - v poziciji za naprej(ACRO mode). Moram priznat da kljub temu da je več dela se da letet nekoliko lažje kot z KK ploščico. Nekako je vse bolj umirjeno.
Potem sem poizkusil z ANGLE funkcijo in je bilo letenje še malo lažje ampak še daleč od lepega...
Z funkcijo baro nisem kaj veliko testiral, saj sem imel sam s sabo preveč dela...
Ko sem pa probal funkcijo HORIZON je bilo od začetka vse lepo, potem pa je quad sili v luft in močno v stran, tudi rotirati se je zače počasi in ker je zadeva pridobivala na hitrosti in šla daleč stran od mene, ne glede na to kam sem ga hotel spravit sem samo gledal kam ga bom parkiral. No in sem ga...na drevo... ene 200m stran od mene in ene 3m visoko je obvisel. Posledice --- NIOBENIH
Tukaj sem imel veliko srečo in mislim da gre tudi zasluga nastavitvam, saj ko ARMamo kontroler, se pričnejo propi vrtet kar pripomore k počasnejšemu padanju.
Zaenkrat sem odmislil BARO in HORIZON funkcijo in bom poizkusil v ACRO modu počasi letet pa tudi z ANGLE se bom poigral.
Čeprav mislim, da bom rabil pomoč pri trimanju modela oziroma pri nastavitvi PIDov... da bom vsaj vedel da model leti tako kot mora in da napake so izključno moje...
Še nastavitve
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Prejle sem spet šel letet in lahko rečem samo ...ADIJO PAMET.
Včeraj ko sem malo testiral razne funkcije ni bilo vse rako lepo in enostavno, danes sem pa rekel, rpobam lete v acro načinu in potem z uporabo Level opcije.
Tako srečen še nisem bil, daj sem pokuril dve bateriji 3200mAh brez kakšnega incidetna.
Letel sem 2x po cca 12min in potem preventivno zamenjal bateriji. Sedaj čakam da se napolnejo, da vidim koliko je še ostalo noter...
Sej ne rečem da je KK ploščica slaba samo za začetnika je NAZE32 amerika. To leti tako lepo in točno, kot da bi vozil po tirih, premiki so točni brez nekega odnašanja, grobo ustavljanje in pomik nazaj ali naprej je verjetno tak kot mora biti (pri kk ploščici je zmeraj zelo trpela višina), obračanje letenje na neki višini, kontrola TH...vse to je carsko tukaj.
Resno, za začetnika je tole bestbuy.
Kot sem že rekel, mogoče se tudi še kaj boljšega dobi samo ne vem če za tak denar.
Prav veselim se, da grem spet trenirat...
Še to moram povdarit - do sedaj nisem še NIKOLI letel z nobeno zadevo in letenje z quadom mi je v čisti užitek.
Mogoče še beseda o tem kaj sem nastavljal - samo trimanje modela na tleh, toliko da ga ne nosi v kakšno stran.
Trimanje poteka enostavno, samo ročko TH pomaknemo naprej na 100% in potem z desno ročico pomikamo vrednost v nasprotno smer, kamor nam nosi model in pri tem poslušamo piske. Vsak pisk je ena korak (ne vem pa koliko veliki so koraki - jaz sem delal z od 4 do 8 piskov).
Če nosi model ob vzletu v levo, pomikamo ročko ob trimanju v desno in obratno....
še slikca kakšne konfiguracije se lahko delajo preko komande
Ni mi dalažilica miru in sem na koncu sprobal še enkrat BARO samo se je zadeva čudno obnašala in sem raje pustil za drugič....
Moram potem še MAG funkcijo sprobat pa še kaj ampak mislim da naslednjič bom samo letel in kuril baterije. Da malo uživam...
ampak mislim da naslednjič bom samo letel in kuril baterije. Da malo uživam...
Včeraj ko sem malo testiral razne funkcije ni bilo vse rako lepo in enostavno, danes sem pa rekel, rpobam lete v acro načinu in potem z uporabo Level opcije.
Tako srečen še nisem bil, daj sem pokuril dve bateriji 3200mAh brez kakšnega incidetna.
Letel sem 2x po cca 12min in potem preventivno zamenjal bateriji. Sedaj čakam da se napolnejo, da vidim koliko je še ostalo noter...
Sej ne rečem da je KK ploščica slaba samo za začetnika je NAZE32 amerika. To leti tako lepo in točno, kot da bi vozil po tirih, premiki so točni brez nekega odnašanja, grobo ustavljanje in pomik nazaj ali naprej je verjetno tak kot mora biti (pri kk ploščici je zmeraj zelo trpela višina), obračanje letenje na neki višini, kontrola TH...vse to je carsko tukaj.
Resno, za začetnika je tole bestbuy.
Kot sem že rekel, mogoče se tudi še kaj boljšega dobi samo ne vem če za tak denar.
Prav veselim se, da grem spet trenirat...
Še to moram povdarit - do sedaj nisem še NIKOLI letel z nobeno zadevo in letenje z quadom mi je v čisti užitek.
Mogoče še beseda o tem kaj sem nastavljal - samo trimanje modela na tleh, toliko da ga ne nosi v kakšno stran.
Trimanje poteka enostavno, samo ročko TH pomaknemo naprej na 100% in potem z desno ročico pomikamo vrednost v nasprotno smer, kamor nam nosi model in pri tem poslušamo piske. Vsak pisk je ena korak (ne vem pa koliko veliki so koraki - jaz sem delal z od 4 do 8 piskov).
Če nosi model ob vzletu v levo, pomikamo ročko ob trimanju v desno in obratno....
še slikca kakšne konfiguracije se lahko delajo preko komande
Ni mi dalažilica miru in sem na koncu sprobal še enkrat BARO samo se je zadeva čudno obnašala in sem raje pustil za drugič....
Moram potem še MAG funkcijo sprobat pa še kaj
Re: Še en začetnik - prvi quadcopter
Bravo! Še GPS potrebuješ pa si zmagal 
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Doživel sem neljubi dogodek, pa mislim, da je dobro da ga delim še z vami. mogoče komu pomaga.
V glavnem odpravim se letet, vse štima, teren znan....
Letim nad travniki, moram biti malo bolj previden, ker je trava že visoka. Nato se dvignem više in letim tako da gledam proti severu. Sonce je nizko in slepi, imam očala gor vse štima.
Ko sem se dvignil dan krošnje pa presenečenje - močan veter. Quada odnese od severa proti zahodu dirketno pred sonce. Iz vida ne spustim quada in ga poizkušam pripeljati nazaj.
Prva težava je v tem da je sonce močno in komaj vidim quada, druga pa ta da ne vem kam je obrnjen. Malo probam levo desno naprej nazaj in ugotovim kam levo desno, zanaprej nazaj pa ni več razločit ker je sonce premočno.
razmišljam kaj sedaj in odločim se da zmanjšam moč in pač probam sledet z očmi quadu, da vidim kam se bo spustil. Vidim ga, za trenutek pogledam stran in že ga več ni. Ojoj, pa je šel....
Komanda začne piskat, da je izgubila stik s sprejemnikom. Nič, ni druge, začnem laufat v smeri padca, komadno nesem s seboj.
Po cca 200m (začne linije ) začne piskat počasneje, kot da bi se hotela povezati. Moram povedat da je ravno tak del cca 30% travnikov in 70% pšenica (do kolen) in ječmen (do pasa).
jao, kje bom zdaj to najdu. Tavam in poslušam piskanje in nekako doličim približen položaj, kje bi lahko bil quad. Nato je signal postal tako močan da se je komanda povezala in ni bilo več piskanja. Tavam po pšenici in ječmenu...
Ostanem brez idej in pokličem Krista, za nasvet. da mi dober nasvet in sicer z telesom naj zakrijem komando in bom videl kje je signal najmočnejši. To naredim in še malo bolj določim smer kje bi lahko bil quad, ko je že spet signal premočen pa sem z obemi rokami objel anteno in dobil še malo več info kje bi lahko bil.
Trava je visoka in že to je pobralo dosti signala, pa še roke in sem bil že blizu. Hodim po travniku 5m stran od gozda in gledam . kar naenkrat pogledam malo za sabo in pol metra stran vidim quada med travo.
polomljeno je imel samo eno roko (spet tiste roke iz HKja ver1 ki so tako rahle da počijo takoj), vse ostalo celo.
Ne morem verjet da sem ga našel.
Dobro je bilo to, da je odletel kmalu na začetku in je bila baterija še toliko polna da sem ga našel. Iskal sem ga ene 45min.
Slabo je bilo to, da je bilo vzletišče in končna lokacija cca 50m višinske razlike med njima pa še ena lnija visokega drevja katero je hitro pobralo signal.
V glavnem, če bi imel GPS uspodobljen bi mogoče RTH opravi to delo, tako da sem ga jaz
Odletel je od roba gozda do drugega roba gozda zračne lnije 550m.
V glavnem odpravim se letet, vse štima, teren znan....
Letim nad travniki, moram biti malo bolj previden, ker je trava že visoka. Nato se dvignem više in letim tako da gledam proti severu. Sonce je nizko in slepi, imam očala gor vse štima.
Ko sem se dvignil dan krošnje pa presenečenje - močan veter. Quada odnese od severa proti zahodu dirketno pred sonce. Iz vida ne spustim quada in ga poizkušam pripeljati nazaj.
Prva težava je v tem da je sonce močno in komaj vidim quada, druga pa ta da ne vem kam je obrnjen. Malo probam levo desno naprej nazaj in ugotovim kam levo desno, zanaprej nazaj pa ni več razločit ker je sonce premočno.
razmišljam kaj sedaj in odločim se da zmanjšam moč in pač probam sledet z očmi quadu, da vidim kam se bo spustil. Vidim ga, za trenutek pogledam stran in že ga več ni. Ojoj, pa je šel....
Komanda začne piskat, da je izgubila stik s sprejemnikom. Nič, ni druge, začnem laufat v smeri padca, komadno nesem s seboj.
Po cca 200m (začne linije ) začne piskat počasneje, kot da bi se hotela povezati. Moram povedat da je ravno tak del cca 30% travnikov in 70% pšenica (do kolen) in ječmen (do pasa).
jao, kje bom zdaj to najdu. Tavam in poslušam piskanje in nekako doličim približen položaj, kje bi lahko bil quad. Nato je signal postal tako močan da se je komanda povezala in ni bilo več piskanja. Tavam po pšenici in ječmenu...
Ostanem brez idej in pokličem Krista, za nasvet. da mi dober nasvet in sicer z telesom naj zakrijem komando in bom videl kje je signal najmočnejši. To naredim in še malo bolj določim smer kje bi lahko bil quad, ko je že spet signal premočen pa sem z obemi rokami objel anteno in dobil še malo več info kje bi lahko bil.
Trava je visoka in že to je pobralo dosti signala, pa še roke in sem bil že blizu. Hodim po travniku 5m stran od gozda in gledam . kar naenkrat pogledam malo za sabo in pol metra stran vidim quada med travo.
polomljeno je imel samo eno roko (spet tiste roke iz HKja ver1 ki so tako rahle da počijo takoj), vse ostalo celo.
Ne morem verjet da sem ga našel.
Dobro je bilo to, da je odletel kmalu na začetku in je bila baterija še toliko polna da sem ga našel. Iskal sem ga ene 45min.
Slabo je bilo to, da je bilo vzletišče in končna lokacija cca 50m višinske razlike med njima pa še ena lnija visokega drevja katero je hitro pobralo signal.
V glavnem, če bi imel GPS uspodobljen bi mogoče RTH opravi to delo, tako da sem ga jaz
Odletel je od roba gozda do drugega roba gozda zračne lnije 550m.
- Priponke
-
- pogled iz vzletišča proti pristanku
- vzletisce_1.jpg (80.47 KiB) Pogledano 4875 krat
-
- pogled iz pristanka proti vzletišču
- pristanek.jpg (21.3 KiB) Pogledano 4875 krat
-
- quadflyaway_resize.jpg (89.11 KiB) Pogledano 4875 krat
Re: Še en začetnik - prvi quadcopter
Najboljši predlog, ki sem ga videl, je piskač, ki ga nastaviš, da se vključi par minut po tem, ko nimaš več dovolj baterije za letenje.
Se pravi, če ti baterija omogoča 12minut, ga nastaviš na 15minut. Tako da če quad ni pri tebi po tem, ko ti je zmanjkalo juica, začne piskat.
Ali pa nekaj takega: http://www.ebay.co.uk/itm/RC-Plane-Find ... 4d07945b5b
Se pravi, če ti baterija omogoča 12minut, ga nastaviš na 15minut. Tako da če quad ni pri tebi po tem, ko ti je zmanjkalo juica, začne piskat.
Ali pa nekaj takega: http://www.ebay.co.uk/itm/RC-Plane-Find ... 4d07945b5b
Re: Še en začetnik - prvi quadcopter
Zdj ima simok esc novi firmware - beacon mode, da, ko ni signala, esc-ji piskajo. Tak FW si lahko uporabnik sam nardi z aplikacijo google chrome: Rapid flash.
Drugače pa, če je bil veter premočan, ti tudi RTH ne pomaga. Glavno je, da si ga našel in da je kokr tok cel.
Drugače pa, če je bil veter premočan, ti tudi RTH ne pomaga. Glavno je, da si ga našel in da je kokr tok cel.
Re: Še en začetnik - prvi quadcopter
Hvalabogu, sem se bal da bo en napisal da mu je quad sel pa pa.
sem kar vesel zate haha
sem kar vesel zate haha
Re: Še en začetnik - prvi quadcopter
Zdravo ,tudi jaz sestavljam moj prvi multirotor ,pa me zanima ali prav razmišljam glede regulatorjev hitrosti .Zalotat je treba skupaj štiri rdeče žice, katere gredo na baterijo in štiri črne skupaj v eno ,rdeče posebaj črne posebaj in potem preko konektorjev na baterijo..Mogoče je mal čudno vprašanje ,ampak je bolje vprašati kot kaj zakuriti.Zanima me tudi ali na komandi izberem program za avijone ali heli.
Re: Še en začetnik - prvi quadcopter
mase daj skupaj ja (črne) pozitivne pa skupaj (rdeče) in potem na konektor. Na komandi izberi za avijone.
Tako nekako naredi pa bo vredu. http://www.hobbyking.com/hobbyking/stor ... /25480.jpg
Tako nekako naredi pa bo vredu. http://www.hobbyking.com/hobbyking/stor ... /25480.jpg
Emax motorji | 2213 | 2216 | BL2822 .... ZS pa se zmenmo
Re: Še en začetnik - prvi quadcopter
hvala.lp
Re: Še en začetnik - prvi quadcopter
Hello mene pa zanima, ce kdo daje v najem quadcopterje?
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Da malo obudim temo in dam par vtisov.
Za letenje mi vedno zmankuje časa, probam pa vsaj v mesecu nardit par poletov.
Do sedaj sem letel z NAZE32, emax motorji, HK reglerji in HK 450 okvirjem. Kot sem že pisal na začetku je bila ta verzija 1 tako krhka da do sedaj nisem polomil še nobenega propa, rok pa že 6.
Vedno so pokale pri motorjih, tam kjer se stanjšajo.
VIdel sem na HKju da je prišla verzija 3 ven, in sem jo naročil, vmes pa ko sem čakal sem premetal opremo na navaden okvir iz alu palic in sredino iz pertinaxa.
Najprej slika starega okvirja

PA slike novega okvirja in razlik:

Primerjava roke V1 vs. V3



Nove roke so debelejše pri vpetju motorjev, plastika jemalo bolj rumenkaste barve in na občutek kar nekaj močnejša. Tudi če probam roko držat na obeh koncih in jo zvijat, je nova roka veliko bolj toga v vseh smereh. Nov okvir bi znal bit dober za začetnika ker je močnejši in še poceni je.
Za letenje mi vedno zmankuje časa, probam pa vsaj v mesecu nardit par poletov.
Do sedaj sem letel z NAZE32, emax motorji, HK reglerji in HK 450 okvirjem. Kot sem že pisal na začetku je bila ta verzija 1 tako krhka da do sedaj nisem polomil še nobenega propa, rok pa že 6.
Vedno so pokale pri motorjih, tam kjer se stanjšajo.
VIdel sem na HKju da je prišla verzija 3 ven, in sem jo naročil, vmes pa ko sem čakal sem premetal opremo na navaden okvir iz alu palic in sredino iz pertinaxa.
Najprej slika starega okvirja
PA slike novega okvirja in razlik:
Primerjava roke V1 vs. V3
Nove roke so debelejše pri vpetju motorjev, plastika jemalo bolj rumenkaste barve in na občutek kar nekaj močnejša. Tudi če probam roko držat na obeh koncih in jo zvijat, je nova roka veliko bolj toga v vseh smereh. Nov okvir bi znal bit dober za začetnika ker je močnejši in še poceni je.
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
No, sedaj pa letam z to zadevo. Je neuničljiva, za najšibkejši člen skrbijo vezice na pristajalnih tačkah (2,5mm). Sta v vsaki luknjici po dve ker ena je res premalo, in če pride do česa čudnega pri pristanku enostavno vezica poči in vse ostane celo.
Noge niso oprimalne ker delujejo kot jadra in ima model malo težav v zraku če letiš z brzino samo za učenje je to to.

Sedaj je gor FPV oprema in moram reči da sem spet presenečen nad letenjem. Če sem prej bil resno živčen pred letenjem sploh če sem šel malo dje sem sedaj hladen kot špricer. FPV letenje mi je veliko lažje.
Seveda nekih nizkih preletov ne delam (no malo probam) v zraku pa je poezija, prostora veliko (tako za letanje kot tudi za napake in testiranje flipov, akro letenje itd..)
Sliko gledam na 8" monitorju kateri je pri bajti že enih 7 let (avtokasutika), priključen je na odslužen AKU iz motorja vse skupaj pa imam postavljeno v protljažniku avtomobila.
Vsedem se noter in uživam
No, moram zamenajti antence ker je nekaj motenj, ravno tako poštimati napajanje za FPV (sedaj je direkt napajanje iz glavne baterije brez filtrov ali beca) pa narediti nosilec za monitor in sprejemnik.
Se mi pa ne mudi ker nimam očal, da bi to nekam postavil, tako da pozicija v prtljažniku zadostuje ker imam monitor v senci.
Noge niso oprimalne ker delujejo kot jadra in ima model malo težav v zraku če letiš z brzino samo za učenje je to to.
Sedaj je gor FPV oprema in moram reči da sem spet presenečen nad letenjem. Če sem prej bil resno živčen pred letenjem sploh če sem šel malo dje sem sedaj hladen kot špricer. FPV letenje mi je veliko lažje.
Seveda nekih nizkih preletov ne delam (no malo probam) v zraku pa je poezija, prostora veliko (tako za letanje kot tudi za napake in testiranje flipov, akro letenje itd..)
Sliko gledam na 8" monitorju kateri je pri bajti že enih 7 let (avtokasutika), priključen je na odslužen AKU iz motorja vse skupaj pa imam postavljeno v protljažniku avtomobila.
Vsedem se noter in uživam
No, moram zamenajti antence ker je nekaj motenj, ravno tako poštimati napajanje za FPV (sedaj je direkt napajanje iz glavne baterije brez filtrov ali beca) pa narediti nosilec za monitor in sprejemnik.
Se mi pa ne mudi ker nimam očal, da bi to nekam postavil, tako da pozicija v prtljažniku zadostuje ker imam monitor v senci.

{kind=link}
Re: Še en začetnik - prvi quadcopter
Najboljša izbira za okvir. Boom-i iz aluminija. In tudi najmanj tresljajev prenaša na plato, plus ne boš zlomil.scorpioncek napisal/-a:No, sedaj pa letam z to zadevo. Je neuničljiva, za najšibkejši člen skrbijo vezice na pristajalnih tačkah (2,5mm). Sta v vsaki luknjici po dve ker ena je res premalo, in če pride do česa čudnega pri pristanku enostavno vezica poči in vse ostane celo.
Noge niso oprimalne ker delujejo kot jadra in ima model malo težav v zraku če letiš z brzino samo za učenje je to to.
Sedaj je gor FPV oprema in moram reči da sem spet presenečen nad letenjem. Če sem prej bil resno živčen pred letenjem sploh če sem šel malo dje sem sedaj hladen kot špricer. FPV letenje mi je veliko lažje.
Seveda nekih nizkih preletov ne delam (no malo probam) v zraku pa je poezija, prostora veliko (tako za letanje kot tudi za napake in testiranje flipov, akro letenje itd..)
Sliko gledam na 8" monitorju kateri je pri bajti že enih 7 let (avtokasutika), priključen je na odslužen AKU iz motorja vse skupaj pa imam postavljeno v protljažniku avtomobila.
Vsedem se noter in uživam
No, moram zamenajti antence ker je nekaj motenj, ravno tako poštimati napajanje za FPV (sedaj je direkt napajanje iz glavne baterije brez filtrov ali beca) pa narediti nosilec za monitor in sprejemnik.
Se mi pa ne mudi ker nimam očal, da bi to nekam postavil, tako da pozicija v prtljažniku zadostuje ker imam monitor v senci.
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Obujam še eno temo, da bom kar tukaj iskal kar rabim...
Končno sem flashnil d8rIIplus in DJT na novo verzijo in usposobil PPM.
Ravno tako sem flashnil in polotal Turnigy 9xr na er9x firmware in usposobil telemetrijo.
Na kitajac bom nataknil ene malo večje motorje katere stojijo doma, zraven bi pa še priklopil minimosd.
Matra me:
kaj priklopim na D8rII plus na drugi kanal kjer je RSSI izhod?
Sej to že vidim na komandi, moram še kaj sem dat?
Nadgradja minimosdja
Priklop minimosdja
https://www.youtube.com/watch?v=dahGlc3Tf40
kakšen nasvet?
Končno sem flashnil d8rIIplus in DJT na novo verzijo in usposobil PPM.
Ravno tako sem flashnil in polotal Turnigy 9xr na er9x firmware in usposobil telemetrijo.
Na kitajac bom nataknil ene malo večje motorje katere stojijo doma, zraven bi pa še priklopil minimosd.
Matra me:
kaj priklopim na D8rII plus na drugi kanal kjer je RSSI izhod?
Sej to že vidim na komandi, moram še kaj sem dat?
Nadgradja minimosdja
Priklop minimosdja
https://www.youtube.com/watch?v=dahGlc3Tf40
kakšen nasvet?
Re: Še en začetnik - prvi quadcopter
Za RSSI iz FrSky boš moral dat vmes še en upor, ker daje ta rx ven rssi v pwm signalu in ti ne bo pravilno kazal osd.scorpioncek napisal/-a:Obujam še eno temo, da bom kar tukaj iskal kar rabim...
Končno sem flashnil d8rIIplus in DJT na novo verzijo in usposobil PPM.
Ravno tako sem flashnil in polotal Turnigy 9xr na er9x firmware in usposobil telemetrijo.
Na kitajac bom nataknil ene malo večje motorje katere stojijo doma, zraven bi pa še priklopil minimosd.
Matra me:
kaj priklopim na D8rII plus na drugi kanal kjer je RSSI izhod?
Sej to že vidim na komandi, moram še kaj sem dat?
Nadgradja minimosdja
Priklop minimosdja
https://www.youtube.com/watch?v=dahGlc3Tf40
kakšen nasvet?
https://code.google.com/p/rush-osd-deve ... dware_Mods
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Ma malo sem zgubljen...
Gledam FW za upgrade minimosdja pa mi ga je ratalo prilopit in videt nastavitve v mwosdju, samo go nekaj spreminjam in dam Write komndo mi odšteva "save attemt" od 20 navzdol...
Sploh pa ne morem pogruntat kako naložit na FW na minimosd...


Gledam FW za upgrade minimosdja pa mi ga je ratalo prilopit in videt nastavitve v mwosdju, samo go nekaj spreminjam in dam Write komndo mi odšteva "save attemt" od 20 navzdol...
Sploh pa ne morem pogruntat kako naložit na FW na minimosd...
Re: Še en začetnik - prvi quadcopter
Z FTDI-jem naložiš FW na minimosd. Ali pa z USBasp samo boš uničil bootloader.scorpioncek napisal/-a:Ma malo sem zgubljen...
Gledam FW za upgrade minimosdja pa mi ga je ratalo prilopit in videt nastavitve v mwosdju, samo go nekaj spreminjam in dam Write komndo mi odšteva "save attemt" od 20 navzdol...
Sploh pa ne morem pogruntat kako naložit na FW na minimosd...
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Uspelo mi je naložit mwosd preko arduina.
Našel sem zelo konkretno temo, katera opisuje rešitev kot težavo na koncu.
V glavnem potrebno je izbrati pravo ploščico ko delaš preko arduina in FTDI adapterja in sicer za minimosd v1.1 se izbere nano ploščica in seveda pravi port.
Nakar lahko uploadaš fw na minimosd (zaženeš arduino in v njem odpreš MWosd fajl ki se nahaja v MWOSD mapi (v paketu MWosd 1.3
http://fpvlab.com/forums/showthread.php ... MWOSD-v1-3
Se mi pa dogaja ravno tako kot tukaj..
Mwosd 1.3 katerega najdemo tukaj https://github.com/ShikOfTheRa/scarab-osd sem po nalaganju probal konfigurirat preko exe aplikacije v win32bit mapi.
fonti se dajo uploadat, ko pa naredim sprememebe v GUI vmesniku jih z Write gumbom ne morem shranit.
Ko pa sem probal z beza releasom MW1.3 SP01 pa se nastavaitve dajo shranit (ta release po zapisu vrednosti to preveri-potrjuje korake).
Na koncu pri obeh ob prklopljeni kameri na zaslonu ne vidim teksta, če pa kamero ugansnem pa nekaj teksta vidim samo še vedno ni to to kar bi moralo biti. Nekako pomešano je vse skupaj...
Kater FW uporabljate na minimosd v1.1?
Našel sem zelo konkretno temo, katera opisuje rešitev kot težavo na koncu.
V glavnem potrebno je izbrati pravo ploščico ko delaš preko arduina in FTDI adapterja in sicer za minimosd v1.1 se izbere nano ploščica in seveda pravi port.
Nakar lahko uploadaš fw na minimosd (zaženeš arduino in v njem odpreš MWosd fajl ki se nahaja v MWOSD mapi (v paketu MWosd 1.3
http://fpvlab.com/forums/showthread.php ... MWOSD-v1-3
Se mi pa dogaja ravno tako kot tukaj..
Mwosd 1.3 katerega najdemo tukaj https://github.com/ShikOfTheRa/scarab-osd sem po nalaganju probal konfigurirat preko exe aplikacije v win32bit mapi.
fonti se dajo uploadat, ko pa naredim sprememebe v GUI vmesniku jih z Write gumbom ne morem shranit.
Ko pa sem probal z beza releasom MW1.3 SP01 pa se nastavaitve dajo shranit (ta release po zapisu vrednosti to preveri-potrjuje korake).
Na koncu pri obeh ob prklopljeni kameri na zaslonu ne vidim teksta, če pa kamero ugansnem pa nekaj teksta vidim samo še vedno ni to to kar bi moralo biti. Nekako pomešano je vse skupaj...
Kater FW uporabljate na minimosd v1.1?
Re: Še en začetnik - prvi quadcopter
Jaz uporabljam kv-osd. Meni se vedno top. Vecina jih uporablja mw-osd.
-
scorpioncek
- Freak
- Prispevkov: 489
- Pridružen: 21 Mar 2004, 23:10
Re: Še en začetnik - prvi quadcopter
Bom probal kvosd. A nalaganje je eno kot pri mwosd (FTDI in arduino).
Vidim da je modelarstvo veliko branja pa malo dela... Cajta pa ni...
Vidim da je modelarstvo veliko branja pa malo dela... Cajta pa ni...